Der Proportionalregler bildet die Differenz zwischen Soll- und Istwert und multipliziert diese mit einem Verstärkungsfaktor. Der P Regler ist ein schneller Regler denn eine Veränderung der Regelgröße führt auch zu einer sprunghaften Änderung des Ausgangs. Der große Nachteil eines P Reglers: er braucht immer eine Abweichung vom Idealfall, sonst gibt es keine Regelung.
Beim Integralregler ist die Stellgröße, abgesehen vom Anfangswert, proportional zum Zeitintegral der Regelabweichung. Da der I Regler Fehler aufsummiert kann mit einem I-Regler auf 0-Fehler ausgeregelt werden. Nachteil des I-Reglers: er ist langsam, es wird integriert und dazu braucht man Zeit.
Der D-Regler, wenn es ihn gäbe, siehe weiter unten, wird auch als Vorhalteregler bezeichnet. Die Stellgröße ist proportional zur Änderungsgeschwindigkeit der Regelabweichung. Bei einer Sprunghaften Änderung reagiert der Regler mit einem Impuls. Er eignet sich daher ideal zur Kompensation des Trägen Verhaltens eines I-Reglers. Einen reinen D-Regler kann es nicht geben, da beim Differenzieren der Sollwert heraus fällt, daher kann er keinen reinen D-Regler bilden. Üblicherweise ist dieser Wert bei Decodern nicht manipulierbar.
Kombiniert man einen P- und einen I- Regler entsteht ein PI-Regler der auf 0-Fehler ausregeln kann, aufgrund der I Eigenschaft aber auch schnell ist, ein Charakteristikum des P Reglers. Ist der P Wert zu hoch gewählt kommt es zu Starken Überschwingen, ist er zu klein, reagiert die Regelung träge. Man muss daher PI Regler immer an das System anpassen, Defaultwerte einer PI Regelung können nur Ausgangspunkt einer Anpassung sein.
The proportional regulator subtracts the current value from the input value and multiplies it by an amplification factor. The result is added to the input value. The P loop is a fast regulation system. The disadvantage is, that it needs a offset, otherwise it cannot work.
The I loop delivers a correcting variable which is proportional to the time integral of the offset. The I loop summarizes the difference between input and output, it corrects the offset to zero. The disadvantage is that the I-loop is slow, as it integrates which needs time.
The D-loop does not exist alone, see below. The correcting variable is the differentiation of the modification speed of the offset. If you feed it with a sudden change the D-regulator will deliver an impulse. This makes it ideal to correct the slow speed of an I-regulator. A pure D-regulator is impossible as it eliminates the set value. It is usually combined with other regulators, for example to build a PID regulator. Usually this value is preset by the manufacturer.
This is the combination of a P and an I loop. The regulator corrects up to a 0-offset as it incorporated an I regulator. It is quite fast a property of the P component. If you set the P value too high it will overshoot, if it is set too small the regulation might be too slow, as known of the I regulator. It is necessary to set both values specifically for a given system. Decoder vendors can only guess an average setup for most common environments.
Ein ruckeliges Fahren kann auch durch Vergrößerung des I Wertes bekämpft werden. Wenn aber die Regelung sehr träge erfolgt, z.B. am Fuß einer Bergstrecke die Geschwindigkeit für 1-2 Sekunden eingeht , dann sollte der I-Wert verkleinert werden.
Wichtig zu verstehen ist, daß man bei Änderung eines Wertes auch implizit die Wirkung des anderen mit verändert. Nur an einem Wert zu "schrauben" kann kein optimales Ergebnis bringen. Wenn ein Wert verändert wurde und durch Erhöhung oder Verkleinerung keine Verbesserung des Fahrverhaltens zu erreichen ist, dann den anderen Wert optimieren. Danach nochmals den 1. Wert nachsehen und auch den 2. nochmals. Diese Optimierungsschleife solange abwechselnd bearbeiten bis beide Werte optimal sind. Das kann durchaus 3-5 x notwendig sein, je nach Modell und den Ansprüchen des Operators.
Wenn man die Temperaturdrift diverser Komponenten und die Abnutzungserscheinungen der Mechanik in Betracht zieht kann man auf eine völlige Optimierung des Regelkreises verzichten, die Lage ändert sich so und so. Bei guten Fahrleistungen des Modells kann man aufhören an den Variablen zu drehen.
If it moves unsteady increasing the I value might also help. If the regulation is too slow, e.g. the loco slows down when it approaches a slope and then reaccelerates, just increase the I value.
It is important to understand that after changing one parameter the function of the other one gets influenced as well. After setting the I value you need to check the P value as well. Next you need to return to the P-value again to verify whether it is necessary to adjust it again. For optimal performance of the control loop this procedure might need to run 3 up to 5 times. In most cases setting and rechecking might bring you quite close to the optimum.
Considering that the loco's performance changes with temperature and wearing out of bearings as well I recommend to set the variables properly but not overdo the optimization.
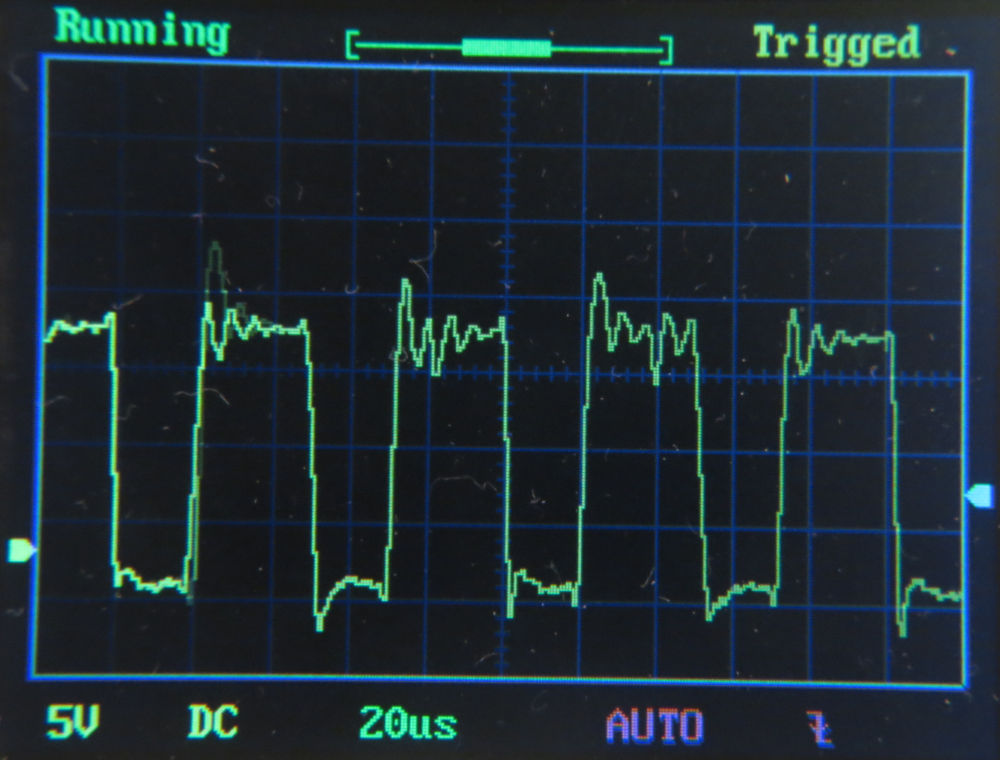
Die HF Entstörglieder in Fahrzeugen können Decodern das Leben schon recht schwer machen. Oft übertreiben Fahrzeughersteller um nur ja keine HF Störungen zu verursachen und legen die Werte übermäßig aus. So habe ich 100nF Keramikkondensatoren in N Modellen gefunden order gar 100µF in einem G Spur Modell. Das kann einen Decoder das Messen der EMK behindern, bzw. schwache Anfahr-PWM "auffressen". Kultiviertes Fahrverhalten ist dann unmöglich. Lösung ist die Entfernung der Entstörbauteile. Der Decoder übernimmt die Funkentstörung.
Das Entfernen ist aber auch keine allgemein gültige Empfehlung. Motore mit starkem Bürstenfeuer die bei überhöhter Gleisspannung betrieben werden erzeugen hohe Spannungsspitzen die möglicherweise den Decoder beschädigen können. In solchen Fällen sind die Kondensatoren unbedingt im Modell zu belassen.
HF filters inside the loco may hinder the decoder to detect the correct EMF of the motor. Quite often models have too big capacitors installed. The vendor tries to stay on the safe side to meet legal requirements. I have found 100nF in a N scale loco or even 100µF across a G scale motor! Good motor operation is not possible with such high capacitors! The model railroader needs to remove the capacitor. The decoder does the HF filtering.
The removal of filters is not a general solution for all cases. There are motors with strong brush fire. That generates spikes which may destroy the decoder. For such motors a small capacitor is definitely required, especially if too high track voltage is used
Wie bereits weiter oben beschrieben sind die Motore stark unterschiedlich aufgebaut, das kann ein Decoder nicht erraten. Je ausgereifter die Regelmechanismen sind um so mehr muß auch der Modellbahner zeit in die Optimierung investieren.
Einzige Alternative wäre das zurück gehen auf minderwertige Regelungen oder das Festlegen auf vom Hersteller gewählte unveränderbare Standardwerte. Diese Decoder werden oft, geradezu betrügerisch, als automatisch einstellende Fahrparameter bezeichnet.
Hochwertige Decoder können ebenfalls in so einen "Dummymode" gebracht werden. Man schaltet den Regelungseinfluß auf 0 und erreicht damit das Verhalten eines ungeregelten Decoders.
As I described more in detail above there are too many variants of motor requirements on the market. No decoder can guess that. Every good model railroader needs to set his requirements correctly.
The only alternative would be to hard code parameters by the decoder vendor. Some vendors call these simple constructions "automatically configured". This is of course camouflaging the inability to do regulation correctly.
High quality decoders may be configured to disable regulation. This brings the decoder into "dummy mode".
Sehr häufig werden Sonderfälle diskutiert wie ein Modell das 2 Motore hat. Die Versorgung mit Decoder ist hier genauso wie bei einem Modell das nur einen Motor hat.
Selbstverständlich sind die beiden Motore nicht völlig ident. Die Parallelschaltung der Motore an den Decoder führt dennoch zu einem Gleichlauf da die beiden Motore vom Decoder aus gesehen wie ein Motor wirken. Der schneller laufende Motor muß dann mehr zum Vortrieb beitragen, dadurch wird er stärker belastet. Die mechanischen und elektrischen Widerstände wirken sich hier auch stärker aus. Der langsam laufende Motor wird entlastet. Damit kann er schneller drehen und es stellt sich sehr rasch ein Gleichgewicht zwischen den beiden Motoren ein.
Da die beiden Motore fest im Lokrahmen sitzen ergibt sich zusätzlich eine enge Koppelung über die Räder und die Schiene. Auch bei Schneckenrad Getrieben ist die kleine mechanische Kopplung die trotz der Schneckenhemmung wirkt ausreichend. Betreibt man eine Doppelmotor Lok am Gleis hat man exakt die gleichen Drehzahlen an den Motoren. Auf einem Rollprüfstand sind die Drehzahlen leicht unterschiedlich weil die mechanische Koppelung fehlt.
Bei einer Doppelmotorlok sind 2 Decoder oder mechanische Maßnahmen wie Kardanwellen zwischen den beiden Antrieben völlig unnötige zusätzliche Komplexität. Bei 2 Decodern hat man vor allem das Problem, daß eine synchrone Abstimmung über alle Temperaturbereiche nicht machbar ist. Sowohl die Mechanik mit den beiden Motoren als auch die Getriebe verändern sich völlig unterschiedlich wenn durch den Betrieb die Temperatur ansteigt.
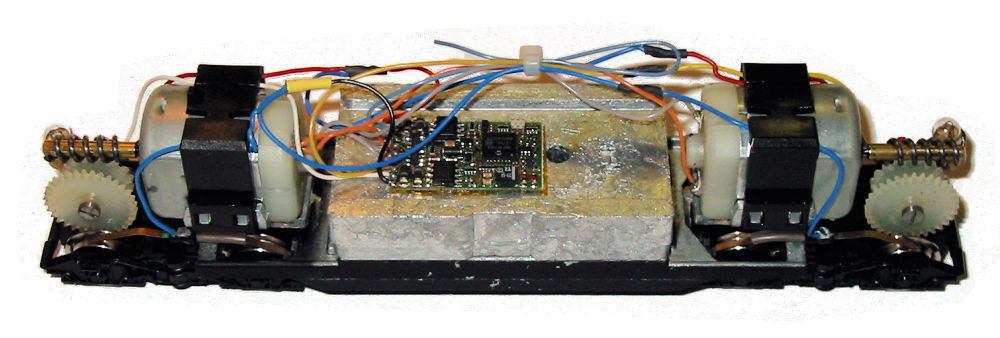
Das nachfolgende Bild zeit das Innenleben einer Kleinbahn 2050. Dieses Modell wird seit Jahrzehnten fast unverändert gebaut. Die beiden Motore treiben über die Schnecke ihr jeweiliges Drehgestell an. In der Analogwelt, hier gibt es keine Decoder oder anderwärtig korrigierende Elektronik, laufen beide Motore synchron.Quite often model railroaders discuss special cases like 2 motors in one model. The wiring is the same as in a model with just one motor.
Of course it is not possible that both motors are identical. Using both of them in parallel the model runs smoothly both motors at same speed. The faster motor has to provide of course more power. The mechanical and electrical resistors have more influence here. The slower motor has less charge and can speed up. This generates a nice balance between the two motores.
As both motors share the same loco frame, there is a tight mechanical coupling between the two. From one motor over the worm gear over the wheels and the track to the other side, the coupling is enough to synchronize the two motors. Operating the model on track shows the two motors have the same RPM. If you do that on a test stand the speed is not identical.
In a double motor model it is not necessary to connect the two motors with a cardan shaft or to use two decoders in one model. They both introduce unnecessary complexity. 2 decoders cause extra complexity as the have toi be carefully parametriced. Unfortunately that will not help at all, as the mechanical as well as the electrical behavior changes on themparature.
The picture underneath shows a Kleinbahn 2050 frame. This model is produced over years. Both motors drive via a worm gear the bogy. In the analog world, there are no decoders or other electronics at all, both motors run synchronously.
The picture shows a small little mistake. The wire running to the pickup in front is blue. The existing wire from Kleinbahn was left in place. Actually it should be black. The real blue wire is folded down an secured wit the cable binder. The bulbs are powered directly from track. The wrong color might introduce some irritation.
Weit komplizierter als der Fall mit 2 Motoren in einem Modell ist einer mehrfach Traktion. Insbesondere wenn die angetriebenen Modelle nicht unmittelbar aneinander gekuppelt sind sondern ein Zug mit vielen Wagen und Kupplungen dazwischen ist. Das Durchverkabeln der Motorversorgung wird meist nicht möglich sein. Mehrpolige leitende Kupplungen sind in allem Maßstäben eine leidige Sache mit vielerlei Ärgerlichkeiten. Daher wird in fast allen Fällen in jeder angetriebenen Lok ein Decoder sitzen.
Jeder dieser Decoder versucht sein Bestes und beginnt die Geschwindigkeit auszuregeln. Selbst bei sehr sorgfältiger Angleichung der beteiligten Loks wird es über den Temperatur Bereich unterschiedliches verhalten der Loks geben. Damit wird der Zug durch die Loks "gestaucht" oder "auseinander gezogen". Bei langen Zügen oder bei stärkerer Unterschiedlichkeit kommt es dann zu Entgleisungen.
Abhilfe ist nach der möglichst guten Angleichung den Decodern einen Schlupf zu erlauben. Eine Möglichkeit ist ein Modell möglichst leicht zu machen indem man Gewicht entfernt um möglichst wenig Traktion zu haben. Haftreifen gehören dann natürlich auch weg. Bei Geschwindigkeitsunterschieden kann diese so vorbereitete Lok mit den Rädern schleudern. Nachteil der Aktion die Traktion dieses Modells ist bescheiden. Der Sinn einer Doppeltraktion mehr Vortriebsleistung zu haben ist dann weg.
Gute Decoder haben eine Einstellung die "Regelungsqualität", "Schlupf", "Motorkraft" odglm. heißt. Hier wird dem Decoder mitgeteilt bei der Regelungsberechnung einen Fehler zuzulassen und innerhalb dieser Bandbreite keine weiteren Korrekturen vorzunehmen. Das ist der gleiche Parameter mit dem man ruckelnde Motore "ausbügeln" kann.
Der Sinn bei der Traktion ist folgender. Wenn man beiden Modellen 10% Fehler zugesteht und die beiden Loks zu 5% unterschiedlich schnell fahren ergibt sich ein Gleichgewicht. Ein Modell ist etwas zu schnell das andere zu langsam. Nachdem der Fehler innerhalb des Toleranzbereichs ist fahren beide Loks synchron. Kommt eine zusätzliche Belastung, wie ein Berg oder enge Kurve, werden die Modelle stärker belastet und die Geschwindigkeit fällt unter den Toleranzrahmen. Dann beginnen die Decoder nachzuregeln. Der Vorteil gegenüber dem Konzept schleudernder Loks ist hier, daß bei Bedarf die volle Traktionsleistung beider Loks abrufbar bleibt.
Much more complex than two motors in a model is the situation on a train with several engines. Especially if the two locos are in front and the back of a train. Running the motor wires through a long train is not so easy. Multipole electrical couplers are not ideal regardless of the scale. That's why the usual solution installs decoders in each loco individually.
her eeach decdoer tries it's best to operate the loco correctly. Even if the user invests a lot of work to parametrice both locos identically they will not tstay the same for a long time. Sooner or later the two engines will push the train together or they will pull the train apart. In bends the train will derail.
A possible solution for that is to allow one loco to slip. This can be done electronicly in the decoder parameters or mechanically. One way is to remove ballast and the traction tires. The slipping wheels are the way out of derailing the train. Unfortunately the advantage of a secondary loco are gone as well. The additional traction is quite limitted.
Good decoders offer a mechanism to influence the regulation. It is called regulation quality, slip, motor power or similar. This defines a bandwidth of limited error correction. Within that bandwidth the decoders stops to correct motor speed. It is the same parameter which might be used to shim pulsing potors.
The idea behind the regulation limitation is the following. Let's assume we allow 10% error. The train moves and the decoder detects a speed difference of 5%. As 10% are allowed the decoder accepts it and does not further correct the speed. So as one loco is faster and the other slower a nice balance installs the the train runs smoothly with no danger of derailing. If load increases, for example a uphill section, the motors will move outside of the tolerance bandwidth and the decoder corrects as desired. The advantage here is the traction stays high. The idea to have 2 engines deployed is also useful in the model scale.
(C) AMW 2017ff Visitors since 2017-07-01: Failed to execute CGI : Win32 Error Code = 2